


IoT Systems in Space Exploration: Data Gathering and Analysis of Martian Environment
Space exploration represents a new frontier of human knowledge. Humanity has always tried to overcome its limits: researchers in the field are looking for increasingly advantageous ways to reach far cosmic distances, thus colonizing and learning from new worlds. Specifically, many astronomers define Mars as the "New Earth"; over the years, it was the destination of many missions, mainly searching for life forms. Systems including proper technologies and communication protocols must be put in place to deal with extra-terrestrial exploration.
In such a direction, the Internet of Things (IoT) paradigm introduces innovative technologies in the astronomy field by realizing evolution systems to be applied in future missions. The scope of the presented work is to describe the design process for realizing an IoT-based system, which is targeted at space exploration. Furthermore, it should represent a starting point for further use in extra-terrestrial applications, where scientists need to monitor and analyze planets or satellites' surfaces or atmospheres.
Application Scenario
IoT-based systems include various devices, able to acquire heterogeneous kinds of information and interact among themselves to achieve a certain scope. The application scenario, which is hereby analyzed, focuses on constructing a Martian rover, shown in Figure 1 [3], capable of acquiring soil samples and information regarding the planet's atmosphere. A command center monitors the space mission from the Earth and instructs the rover. First, it can move autonomously on the Martian surface with three pairs of wheels; then, it has a camera to record the surrounding environment.
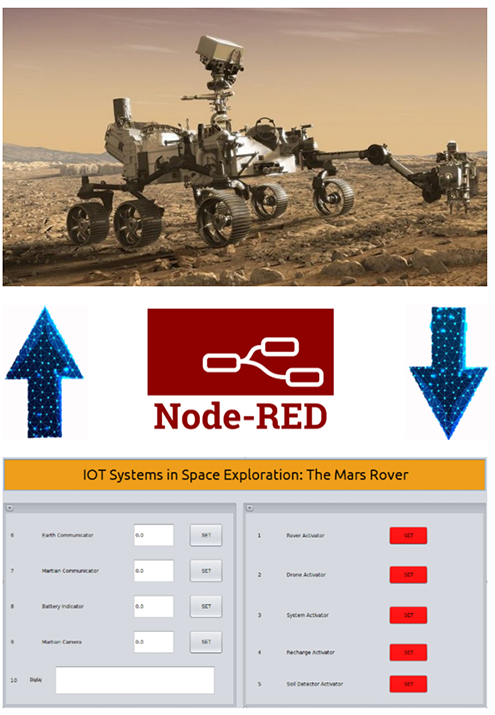
Figure 1: System overview.
The main components of the system are:
- an antenna for communications with the NASA command center;
- the central system, to control all the other devices;
- solar panels to recharge the rover when the battery is lower than 30%;
- a camera capable of providing footage of the surrounding environment;
- a soil sample detector;
- a drone that can be remotely activated for the collection of atmospheric data.
Challenges
The project design presents some issues in managing communications because all transmitted commands from the Earth have to travel long distances. All communications between Mars and Earth happen through satellites. Due to the distance, a substantial delay is generated [1][2]. As communication signals travel at the speed of light, it can take between 3 and 22 minutes for the information to reach the destination.
Prototyping
The project reproduces what would happen in a real case. The system behavior is simulated with an application (Figure 1 below), which interacts with the Node-Red framework [6]. Node-Red is a software framework acting as a middleware, thus representing the logical side of the system, able to interact with both the data sources and the final recipients. Node-Red allows creating flows to simulate the behavior of the involved IoT devices when the control console (Figure 2) works.
NASA communicates with rovers using the Deep Space Network (DSA): a net of radio telescopes that carry out support activities in the field of radio and radar communication. An antenna sends instructions in the form of radio waves from the Earth Communicator. They are received by Mars Communicator connected to the rover's antenna, which is in charge of routing the correct command to the proper sensor.
Instead, the Martian rover's components mentioned above communicate among each other using the MQTT protocol. It is an asynchronous protocol, which means the messages are published, and the interested devices subscribe themselves to obtain the desired information. Note that all data exchange is encrypted.
Each device has a numeric identifier that the System_Activation Flow (Figure 3) will use to define which device will turn on/off to execute a certain task in response to a certain situation. The system's behavior is managed following accurate rules and data flows to prevent failures and waste of resources. For example, CodeSystemActivationPublisher (Figure 3) will publish the Code1 received from MarsCommListener (Figure 4) that will execute all systems activation procedures. The same reasoning will apply to the other MQTT publishers, which will activate the recharge system (Code2), drone (Code3), soil detector (Code4), and camera (Code5), respectively.

Figure 2: The portion of System_Activation flow for managing the various devices.
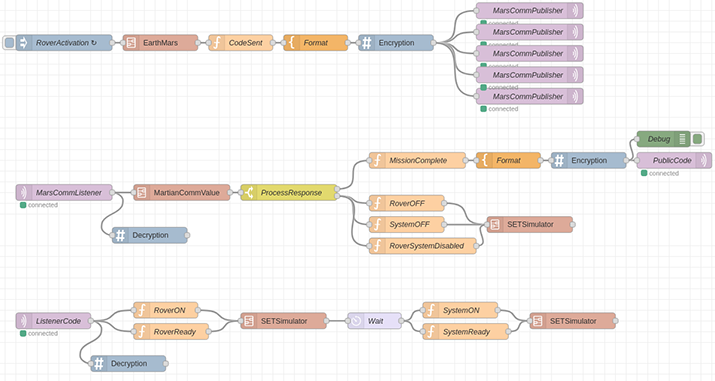
Figure 3: The portion of System_Activation flow to activate system components.
The system will implement other vital functions, such as gathering atmospheric data or soil samples and building graphs (Figure 4). The first operation is permitted by the presence of a drone [4] activated, which can move from the connected rover and fly through Mars's atmosphere. The second one is managed thanks to a mechanical arm [5], drilling the soil to extract samples. Moreover, the rover owns a camera to take pictures, monitor the environment, and avoid obstacles [5]. In the end, Mars's rover is equipped with a recharging system to charge the battery using installed solar panels.
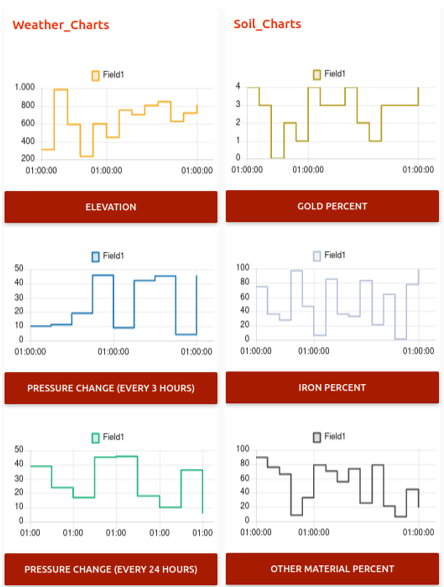
Figure 4: Graphs obtained from processed data.
Conclusion
The investigated scenario could represent a starting point for designing solutions in the space exploration and monitoring field. In this sense, the Node-RED tool allows to define the involved entities and sensors and simulate the behavior of both application logic and communication protocol.
The case of the Mars rover is intended as an example of an application for collecting data on extra-terrestrial environments, with atmospheric and surface features like the Earth [7]. Hence, if correctly set up, the envisioned technologies could be adopted in various applications on other planets or satellites. For example, they could help geologists with their studies and exploration of different surfaces [8]. Also, scientists could analyze atmospheric variations and their influence on climatic mutation, compared with the Earth.
Note that some situations could require monitoring a wide area; therefore, a distributed and interoperable system must be implemented [9]. In such a direction, the IoT paradigm perfectly fits the need to manage information from different sources. Therefore, realizing a distributed architecture to handle heterogeneous data in extra-terrestrial environments can be considered an exciting research topic.
Future research development includes monitoring energy consumption and integrating security functionalities to make the system reliable in the presence of sensitive information.
References
- T. Kulkarni, A. Dharne and D. Mortari, "Continuing the Voyage of Discovery", 1st Space Exploration Conference, 30 January - 1 February 2005
- K. Bhasin and J. Hayden (Glenn Research Center, Cleveland, Ohio), J. R. Agre, L. P. Clare and T. Yan (Jet Propulsion Laboratory, Pasadena, California), "Advanced Communication and Networking Technologies for Mars Exploration" (2001), 19th Annual AIAA International Communications Satellite Systems Conference, Toulouse (France), 17-20
- The structure of the Martian Rover https://mars.nasa.gov/mars2020/, September 2021
- The drone used to collect atmospheric data https://mars.nasa.gov/technology/helicopter/#Quick-Facts September 2021, September 2021
- The functionalities of the soil sample collector and of the Rover camera https://www.nasa.gov/perseverance, September 2021
- Node-Red framework by IBM https://nodered.org/, September 2021
- V. Stamenković, L. W. Beegle, K. Zacny, D. D. Arumugam, P. Baglioni, N. Barba, and R. Woolley (2019), "The next frontier for planetary and human exploration", Nature Astronomy, 3(2), 116-120
- Geology with Rover https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/Planetary_geology_with_Pangaea, September 2021
- T. M. Hare, A. P. Rossi, A. Frigeri, and C. Marmo (2018), "Interoperability in planetary research for geospatial data analysis", Planetary and Space Science, 150, 36 – 42
 Alessandra Rizzardi received BS/MS degree in Computer Science 110/110 cum laude at the University of Insubria (Varese, Italy) in 2011 and 2013, respectively. In 2016 she got her Ph.D. in Computer Science and Computational Mathematics at the same University, under the guidance of Prof. Sabrina Sicari. Until now, she has been an Assistant Professor in Software Engineer at the University of Insubria. Her research activity is on Internet of Things and Wireless Sensor Networks security issues.
Alessandra Rizzardi received BS/MS degree in Computer Science 110/110 cum laude at the University of Insubria (Varese, Italy) in 2011 and 2013, respectively. In 2016 she got her Ph.D. in Computer Science and Computational Mathematics at the same University, under the guidance of Prof. Sabrina Sicari. Until now, she has been an Assistant Professor in Software Engineer at the University of Insubria. Her research activity is on Internet of Things and Wireless Sensor Networks security issues.
 Alessandro Ciapponi received a BS degree in Computer Science at the University of Insubria (Varese, Italy) in 2020. He is currently attending the last year of his MS degree in Computer Science at the same University. In addition, he carried out some experience gained internships, working with Arduino, SAP HANA, and Historian database.
Alessandro Ciapponi received a BS degree in Computer Science at the University of Insubria (Varese, Italy) in 2020. He is currently attending the last year of his MS degree in Computer Science at the same University. In addition, he carried out some experience gained internships, working with Arduino, SAP HANA, and Historian database.
 Sabrina Sicari is an Associate Professor at the University of Insubria (Varese, Italy). She received her Laurea degree in Electronical Engineering, 110/110 cum laude, from the University of Catania, in 2002, where, in 2006, she got her Ph.D. in Computer and Telecommunications Engineering, followed by Prof. Aurelio La Corte. She is a Senior IEEE member and member of COMNET, IEEE IoT, ETT, ITL editorial board. Her research activity is on security, privacy, and trust in WSN, WMSN, IoT, and distributed systems.
Sabrina Sicari is an Associate Professor at the University of Insubria (Varese, Italy). She received her Laurea degree in Electronical Engineering, 110/110 cum laude, from the University of Catania, in 2002, where, in 2006, she got her Ph.D. in Computer and Telecommunications Engineering, followed by Prof. Aurelio La Corte. She is a Senior IEEE member and member of COMNET, IEEE IoT, ETT, ITL editorial board. Her research activity is on security, privacy, and trust in WSN, WMSN, IoT, and distributed systems.
Sign Up for IoT Technical Community Updates
Calendar of Events
IEEE 8th World Forum on Internet of Things (WF-IoT) 2022
26 October-11 November 2022
Call for Papers
IEEE Internet of Things Journal
Special issue on Towards Intelligence for Space-Air-Ground Integrated Internet of Things
Submission Deadline: 1 November 2022
Special issue on Smart Blockchain for IoT Trust, Security and Privacy
Submission Deadline: 15 November 2022
Past Issues
September 2022
July 2022
March 2022
January 2022
November 2021
September 2021
July 2021
May 2021
March 2021
January 2021
November 2020
July 2020
May 2020
March 2020
January 2020
November 2019
September 2019
July 2019
May 2019
March 2019
January 2019
November 2018
September 2018
July 2018
May 2018
March 2018
January 2018
November 2017
September 2017
July 2017
May 2017
March 2017
January 2017
November 2016
September 2016
July 2016
May 2016
March 2016
January 2016
November 2015
September 2015
July 2015
May 2015
March 2015
January 2015
November 2014
September 2014